#include "devObj.h"#include "mrf/object.h"#include "mrf/databuf.h"#include "mrmDataBufTx.h"#include <epicsExport.h>#include "devMrmBuf.h"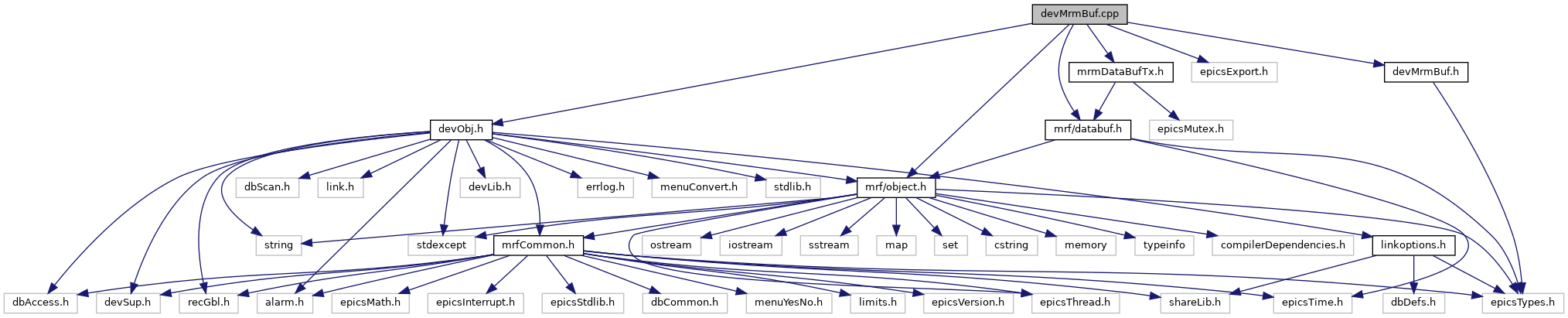
Go to the source code of this file.
Classes | |
| struct | mrmBufferInfo |
Macros | |
| #define | BUF_RX ":BUFRX" |
| #define | BUF_TX ":BUFTX" |
Functions | |
| mrmBufferInfo_t * | mrmBufInit (const char *dev_name) |
| Initialize buffer data structure. More... | |
| epicsStatus | mrmBufRxSupported (mrmBufferInfo_t *data) |
| Checks whether receive buffer is supported. More... | |
| epicsStatus | mrmBufTxSupported (mrmBufferInfo_t *data) |
| Checks whether transferring buffer is supported. More... | |
| epicsStatus | mrmBufEnable (mrmBufferInfo_t *data) |
| Disable buffer sending logic. More... | |
| epicsStatus | mrmBufDisable (mrmBufferInfo_t *data) |
| Disable buffer sending logic. More... | |
| epicsStatus | mrmBufMaxLen (mrmBufferInfo *data, epicsUInt32 *maxLength) |
| Get maximum supported buffer length. More... | |
| epicsStatus | mrmBufSend (mrmBufferInfo *data, epicsUInt32 len, epicsUInt8 *buf) |
| Send buffer data. More... | |
| epicsStatus | mrmBufRegCallback (mrmBufferInfo *data, mrmBufRecievedCallback callback, void *pass) |
| Register data receive callback function. More... | |
Macro Definition Documentation
◆ BUF_RX
| #define BUF_RX ":BUFRX" |
Definition at line 14 of file devMrmBuf.cpp.
◆ BUF_TX
| #define BUF_TX ":BUFTX" |
Definition at line 15 of file devMrmBuf.cpp.
Function Documentation
◆ mrmBufDisable()
| epicsStatus mrmBufDisable | ( | mrmBufferInfo_t * | data | ) |
Disable buffer sending logic.
Disables data buffer logic for both transfer and receive functionality.
- Parameters
-
data The buffer information data structure
- Returns
- Returns 0 on success -1 on failure.
Definition at line 109 of file devMrmBuf.cpp.
◆ mrmBufEnable()
| epicsStatus mrmBufEnable | ( | mrmBufferInfo_t * | data | ) |
Disable buffer sending logic.
Enables data buffer logic for both transfer and receive functionality. This is already called by the enable record so it is only needed if the records for buffer enabling are not present.
- Parameters
-
data The buffer information data structure
- Returns
- Returns 0 on success -1 on failure.
Definition at line 96 of file devMrmBuf.cpp.
◆ mrmBufInit()
| mrmBufferInfo_t* mrmBufInit | ( | const char * | dev_name | ) |
Initialize buffer data structure.
This function allocates and initializes the structure for use with other functions. Device name should correspond to the same name as is used when initializing EVR or EVG device with either mrmEv*SetupVME or mrmEv*SetupPCI functions / iocsh commands.
- Parameters
-
dev_name The name of the device to use for buffer sending and receiving
- Returns
- Returns the structure pointer on success and NULL on failure.
Definition at line 24 of file devMrmBuf.cpp.
◆ mrmBufMaxLen()
| epicsStatus mrmBufMaxLen | ( | mrmBufferInfo_t * | data, |
| epicsUInt32 * | maxLength | ||
| ) |
Get maximum supported buffer length.
- Parameters
-
data The buffer information data structure maxLength Maximum buffer length in bytes
- Returns
- Returns 0 on success -1 on failure.
Definition at line 122 of file devMrmBuf.cpp.
◆ mrmBufRegCallback()
| epicsStatus mrmBufRegCallback | ( | mrmBufferInfo_t * | data, |
| mrmBufRecievedCallback | callback, | ||
| void * | param | ||
| ) |
Register data receive callback function.
- Parameters
-
data The buffer information data structure callback Callback function to be registered param Parameter which is passed to the calllback when it is executed
- Returns
- Returns 0 on success -1 on failure.
Definition at line 156 of file devMrmBuf.cpp.
◆ mrmBufRxSupported()
| epicsStatus mrmBufRxSupported | ( | mrmBufferInfo_t * | data | ) |
Checks whether receive buffer is supported.
Since some devices (EVR or EVG) might only support transfer functionality this function allows you to check whether you can call all receive-related functions for this device.
- Parameters
-
data The buffer information data structure
- Returns
- Returns 1 if supported, 0 if not and -1 if data is NULL.
Definition at line 67 of file devMrmBuf.cpp.
◆ mrmBufSend()
| epicsStatus mrmBufSend | ( | mrmBufferInfo_t * | data, |
| epicsUInt32 | len, | ||
| epicsUInt8 * | buf | ||
| ) |
Send buffer data.
The function blocks until data is sent completely.
- Parameters
-
data The buffer information data structure len Buffer length in bytes buf Array of buffer data
- Returns
- Returns 0 on success -1 on failure.
Definition at line 139 of file devMrmBuf.cpp.
◆ mrmBufTxSupported()
| epicsStatus mrmBufTxSupported | ( | mrmBufferInfo_t * | data | ) |
Checks whether transferring buffer is supported.
Since some devices (EVR or EVG) might only support receive functionality this function allows you to check whether you can call all transfer-related functions for this device.
- Parameters
-
data The buffer information data structure
- Returns
- Returns 1 if supported, 0 if not and -1 if data is NULL.
Definition at line 81 of file devMrmBuf.cpp.
