#include <drvemPulser.h>
Public Member Functions | |
| MRMPulser (const std::string &n, epicsUInt32, EVRMRM &) | |
| virtual | ~MRMPulser () |
| virtual void | lock () const OVERRIDE FINAL |
| virtual void | unlock () const OVERRIDE FINAL |
| virtual bool | enabled () const OVERRIDE FINAL |
| virtual void | enable (bool) OVERRIDE FINAL |
| virtual void | setDelayRaw (epicsUInt32) OVERRIDE FINAL |
| virtual void | setDelay (double) OVERRIDE FINAL |
| virtual epicsUInt32 | delayRaw () const OVERRIDE FINAL |
| virtual double | delay () const OVERRIDE FINAL |
| virtual void | setWidthRaw (epicsUInt32) OVERRIDE FINAL |
| virtual void | setWidth (double) OVERRIDE FINAL |
| virtual epicsUInt32 | widthRaw () const OVERRIDE FINAL |
| virtual double | width () const OVERRIDE FINAL |
| virtual epicsUInt32 | prescaler () const OVERRIDE FINAL |
| virtual void | setPrescaler (epicsUInt32) OVERRIDE FINAL |
| virtual bool | polarityInvert () const OVERRIDE FINAL |
| virtual void | setPolarityInvert (bool) OVERRIDE FINAL |
| epicsUInt32 | enables () const |
| void | setEnables (epicsUInt32 inps) |
| epicsUInt32 | masks () const |
| void | setMasks (epicsUInt32 inps) |
| virtual MapType::type | mappedSource (epicsUInt32 src) const OVERRIDE FINAL |
| What action is source 'src' mapped to? More... | |
| virtual void | sourceSetMap (epicsUInt32 src, MapType::type action) OVERRIDE FINAL |
| Set mapping of source 'src'. More... | |
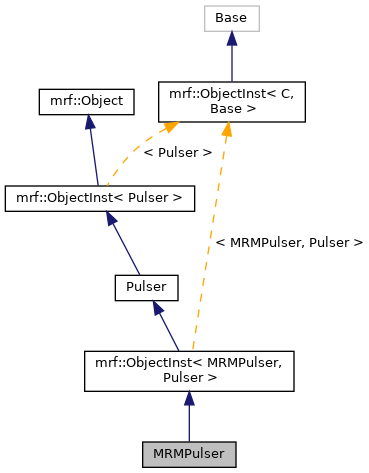
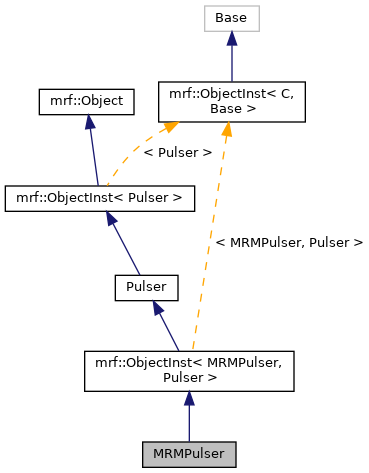
 Public Member Functions inherited from mrf::ObjectInst< MRMPulser, Pulser > Public Member Functions inherited from mrf::ObjectInst< MRMPulser, Pulser > | |
| virtual propertyBase * | getPropertyBase (const char *pname, const std::type_info &ptype) |
| virtual void | visitProperties (bool(*cb)(propertyBase *, void *), void *arg) |
| Public Member Functions inherited from Pulser | |
| Pulser (const std::string &n) | |
| virtual | ~Pulser ()=0 |
| Public Member Functions inherited from mrf::Object | |
| const std::string & | name () const |
| const Object * | parent () const |
| child_iterator | beginChild () const |
| child_iterator | endChild () const |
| template<typename P > | |
| mrf::auto_ptr< property< P > > | getProperty (const char *pname) |
Additional Inherited Members | |
| Public Types inherited from mrf::Object | |
| typedef m_obj_children_t::const_iterator | child_iterator |
| typedef std::map< std::string, std::string > | create_args_t |
| typedef Object *(* | create_factory_t) (const std::string &name, const std::string &klass, const create_args_t &args) |
| Static Public Member Functions inherited from mrf::ObjectInst< MRMPulser, Pulser > | |
| static int | initObject () |
| Static Public Member Functions inherited from mrf::ObjectInst< Pulser > | |
| static int | initObject () |
| Static Public Member Functions inherited from mrf::Object | |
| static Object * | getObject (const std::string &name) |
| static Object * | getCreateObject (const std::string &name, const std::string &klass, const create_args_t &args=create_args_t()) |
| static void | addFactory (const std::string &klass, create_factory_t fn) |
| static void | visitObjects (bool(*)(Object *, void *), void *) |
| Protected Member Functions inherited from mrf::ObjectInst< MRMPulser, Pulser > | |
| ObjectInst (const std::string &n) | |
| ObjectInst (const std::string &n, A &a) | |
| virtual | ~ObjectInst () |
| Protected Member Functions inherited from mrf::ObjectInst< Pulser > | |
| ObjectInst (const std::string &n) | |
| ObjectInst (const std::string &n, A &a) | |
| Protected Member Functions inherited from mrf::Object | |
| Object (const std::string &n, const Object *par=0) | |
| virtual | ~Object ()=0 |
Detailed Description
Definition at line 20 of file drvemPulser.h.
Constructor & Destructor Documentation
◆ MRMPulser()
| MRMPulser::MRMPulser | ( | const std::string & | n, |
| epicsUInt32 | i, | ||
| EVRMRM & | o | ||
| ) |
Definition at line 28 of file drvemPulser.cpp.
◆ ~MRMPulser()
|
inlinevirtual |
Definition at line 28 of file drvemPulser.h.
Member Function Documentation
◆ delay()
|
virtual |
Implements Pulser.
Definition at line 84 of file drvemPulser.cpp.
◆ delayRaw()
|
virtual |
◆ enable()
|
virtual |
◆ enabled()
|
virtual |
◆ enables()
| epicsUInt32 MRMPulser::enables | ( | ) | const |
Definition at line 156 of file drvemPulser.cpp.
◆ lock()
|
virtual |
◆ mappedSource()
|
virtual |
What action is source 'src' mapped to?
Implements Pulser.
Definition at line 201 of file drvemPulser.cpp.
◆ masks()
| epicsUInt32 MRMPulser::masks | ( | ) | const |
Definition at line 178 of file drvemPulser.cpp.
◆ polarityInvert()
|
virtual |
◆ prescaler()
|
virtual |
◆ setDelay()
|
virtual |
Implements Pulser.
Definition at line 66 of file drvemPulser.cpp.
◆ setDelayRaw()
|
virtual |
◆ setEnables()
| void MRMPulser::setEnables | ( | epicsUInt32 | inps | ) |
Definition at line 161 of file drvemPulser.cpp.
◆ setMasks()
| void MRMPulser::setMasks | ( | epicsUInt32 | inps | ) |
Definition at line 183 of file drvemPulser.cpp.
◆ setPolarityInvert()
|
virtual |
◆ setPrescaler()
|
virtual |
◆ setWidth()
|
virtual |
Implements Pulser.
Definition at line 101 of file drvemPulser.cpp.
◆ setWidthRaw()
|
virtual |
◆ sourceSetMap()
|
virtual |
Set mapping of source 'src'.
Implements Pulser.
Definition at line 245 of file drvemPulser.cpp.
◆ unlock()
|
virtual |
◆ width()
|
virtual |
Implements Pulser.
Definition at line 119 of file drvemPulser.cpp.
◆ widthRaw()
|
virtual |
The documentation for this class was generated from the following files:
